หุ่นยนต์สำหรับหยิบชิ้นงานที่กระจัดกระจาย ทับซ้อนกันจำนวนมาก | หยิบชิ้นงานอัตโนมัติได้อย่างง่ายดายด้วยเครื่องสแกน 3 มิติและกล้อง
รูปแบบการทำงานแบบอัตโนมัติและการลดต้นทุนแรงงานจาก Hamasho Corporation (Thailand) ที่ง่ายต่อการนำไปใช้ในสายการผลิตล็อตสินค้าขนาดเล็กที่มีความหลากหลาย
▶ โซลูชันที่ 1: กระบวนการหยอดของเหลวอัตโนมัติ
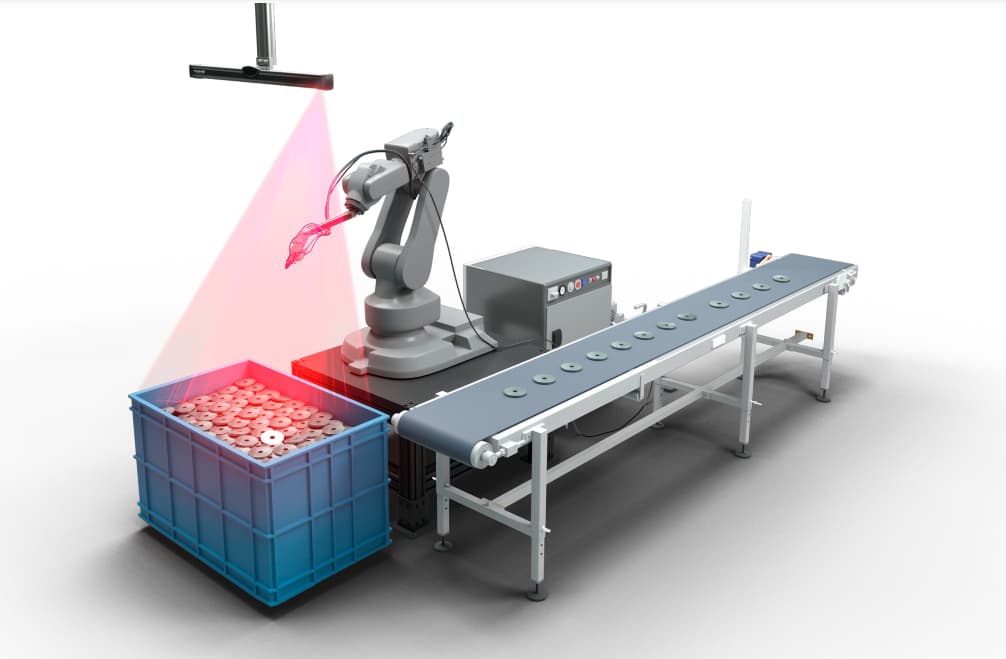
การหยิบชิ้นงานที่กระจัดกระจาย ด้วยหุ่นยนต์ที่ติดตั้งเครื่องสแกน 3 มิติ
โซลูชันที่ 2
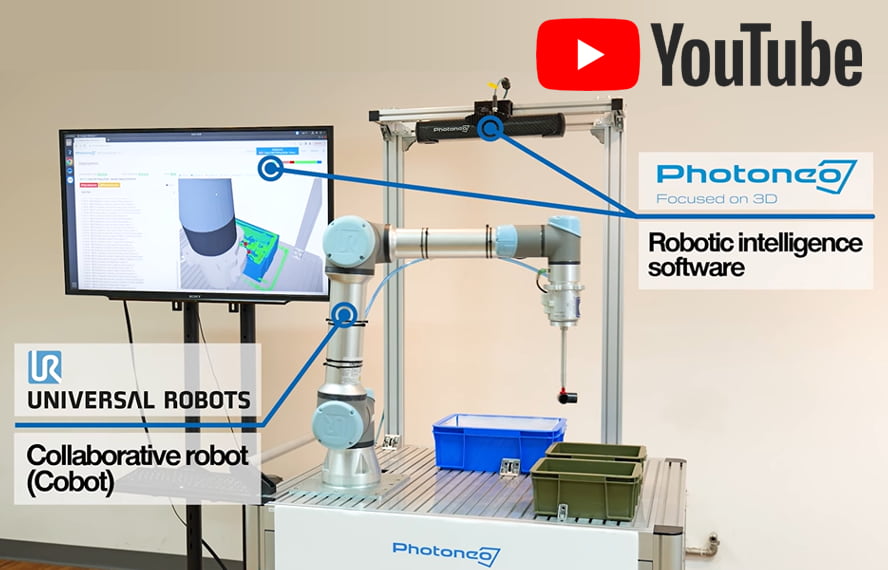
หยิบชิ้นงานกระจัดกระจายทับซ้อนกันได้อย่างอัตโนมัติ
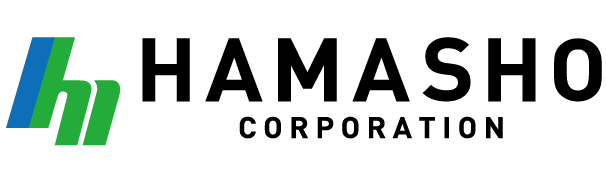
<อุปกรณ์ที่ต้องใช้ร่วมกัน>
– หุ่นยนต์ร่วมปฏิบัติงาน UR5e ของ Universal Robots
– Bin Picking แบบ 3D ร่วมกับซอฟต์แวร์ ของ Photoneo
– มือจับ Gripper ของ SMC

รูปแบบการทำงานสำหรับหยิบชิ้นงานในสายการผลิตภายในโรงงาน โดยใช้เครื่องสแกน 3D แบบพิเศษ ในการคัดแยกและหยิบจับวัตถุที่กระจัดกระจายไม่เป็นระเบียบอยู่ในภาชนะ และยังสามารถหลีกเลี่ยงความเสี่ยงที่จะเกิดการชนกันได้ จึงทำให้หยิบชิ้นงานได้อย่างแม่นยำ
โดยปกติแล้วการหยิบชิ้นงานจะดำเนินการโดยมนุษย์ แต่การใช้รูปแบบการทำงานนี้จะช่วยปรับปรุงประสิทธิภาพการผลิตได้อย่างมาก นอกจากนี้ยังไม่จำเป็นต้องใช้อุปกรณ์พิเศษ เช่น เครื่องป้อนชิ้นงาน ซึ่งจะช่วยลดต้นทุนการลงทุนสำหรับสายการผลิตลงได้
“PhoXi Scanner” เครื่องสแกน 3 มิติความแม่นยำสูงของ Photoneo & “Bin Picking Studio” ซอฟต์แวร์ของหุ่นยนต์สำหรับการหยิบจับจากวัตถุที่อยู่ในภาชนะที่กระจัดกระจาย
สแกนเนอร์ 3 มิติของ Photoneo เป็นหัวใจสำคัญของหุ่นยนต์รูปแบบ Bin Picking ถือเป็นนวัตกรรมใหม่ที่ช่วยให้การหยิบจับชิ้นงานของหุ่นยนต์เป็นเรื่องง่าย ซึ่งแต่เดิมการ Teaching และ Setting โปรแกรมหุ่นยนต์เป็นขั้นตอนที่ยุ่งยาก
คุณสมบัติเด่นของซอฟต์แวร์เฉพาะ “Bin Picking Studio”
ไม่จำเป็นต้อง Teaching หุ่นยนต์
ด้วยการลงทะเบียนติดตั้งโปรแกรมซอฟต์แวร์ CAD และ CAD ของตัวมือจับ Gripper ที่สามารถวิเคราะห์ ตรวจจับ และคัดแยกวัตถุได้ ทำให้สามารถตั้งค่าตำแหน่ง และระบุตำแหน่งในการหยิบจับชิ้นงานได้ล่วงหน้า จึงสามารถดำเนินการโดยใช้กล้องสแกน 3 มิติ นำชิ้นงานไปวางยังพื้นที่เป้าหมายที่กำหนดเอาไว้ได้อย่างแม่นยำ
หลีกเลี่ยงการชนโดยอัตโนมัติโดยใช้การคำนวณวิถี
ตัวควบคุมเฉพาะจะคำนวณวิถีการเคลื่อนที่ของหุ่นยนต์ที่จำเป็นสำหรับการหยิบโดยอัตโนมัติ ป้องกันการชนกันและทำให้เกิดการหยิบที่แม่นยำ จนนำไปสู่การคำนวณวิถีได้โดยพิจารณาจากกล่องชิ้นงานและสภาพแวดล้อมรอบๆ หุ่นยนต์
การสอบเทียบเครื่องมือที่ง่าย
โดยทั่วไปแล้วเมื่อติดกล้องเข้ากับหุ่นยนต์จำเป็นต้องมีการสอบเทียบกล้อง, ปรับทิศทางและระดับของกล้องกับหุ่นยนต์ เพื่อให้ตรงพิกัดที่ต้องการ อย่างไรก็ตาม ซอฟต์แวร์นี้ไม่จำเป็นต้องตั้งค่าอย่างละเอียดเพียงแค่ติดชิ้นงานที่ต้องการเข้ากับปลายกริปเปอร์และถ่ายภาพสี่ช็อตขึ้นไปเพื่อทำการตั้งค่าให้เสร็จสมบูรณ์