
バラ積み部品のロボットピッキング|3Dスキャナー&カメラでビンピッキングを簡単に自動化
浜正タイランドが提案する多品種小ロット生産のモノづくり現場でも導入しやすい自動化・省人化ソリューションをご紹介します。
3Dスキャナーを用いたロボットによるバラ積みピッキング
Solution.2 バラ積み部品の自動ピッキング
<機器構成>
協働ロボット「UR5e」(ユニバーサルロボット)
× 3Dスキャナー&ソフトウェア(Photoneo)
× ロボットグリッパー(SMC)

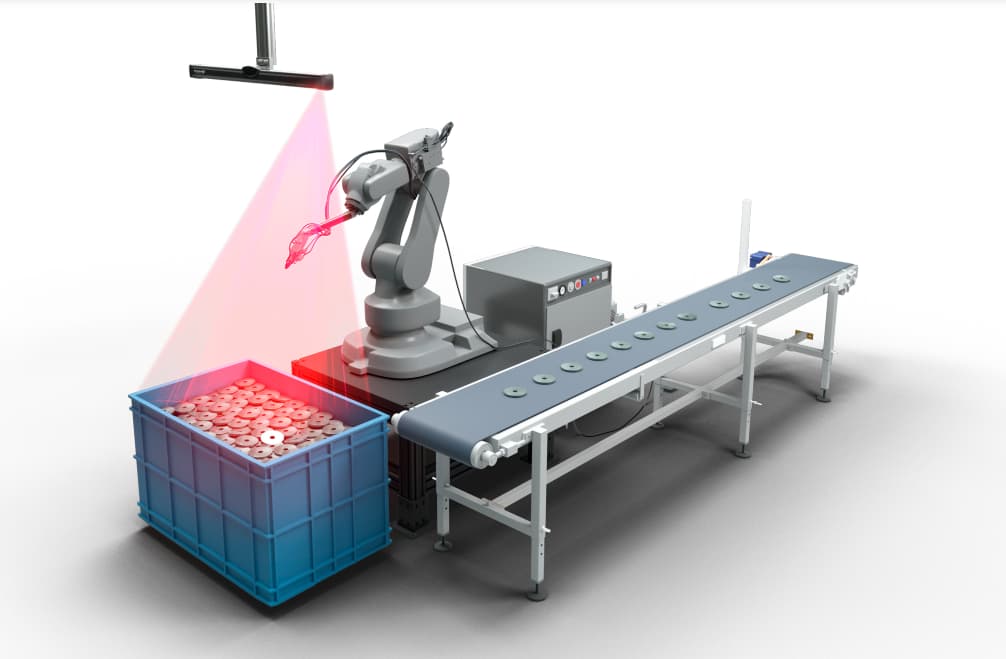
工場の生産ラインにおいて、バラ積みされた部品のピッキングを想定したデモソリューションです。ケース内にバラ積みされた部品を特殊な3Dスキャナーを使用して衝突リスクを回避しながら自動で軌道を演算し、正確にピッキングします。
ピッキング作業は未だに人手で行われることの多い工程なので、ここが自動化できると生産効率の改善に大きく貢献します。また、パーツフィーダーなどの専用装置も不要となり、生産ラインへの投資コストも抑えることができます。
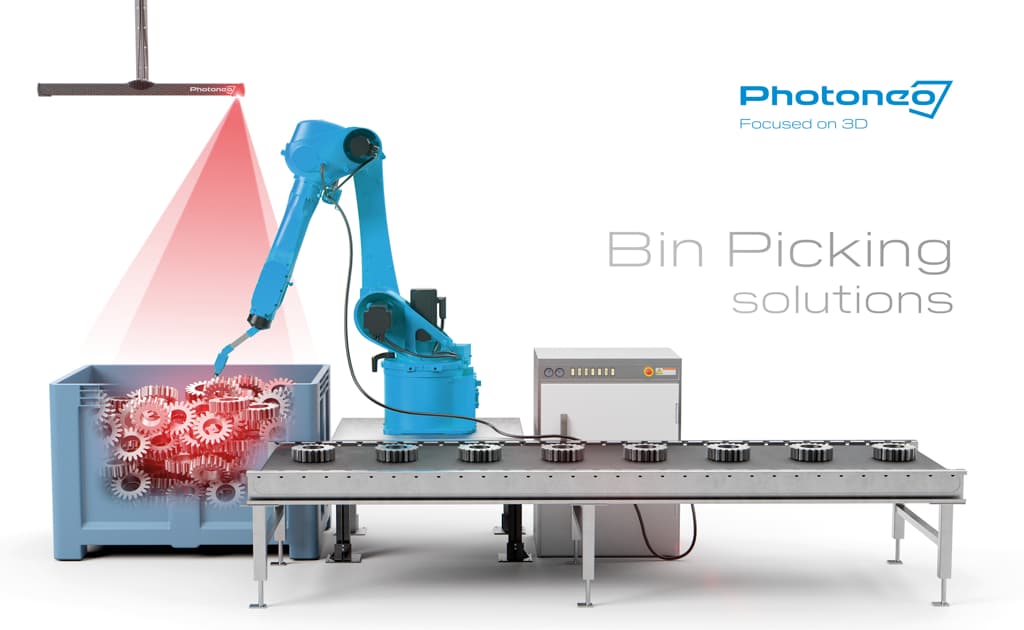
Photoneo社の高精度3Dスキャナ「PhoXi Scanner」&専用ピッキングソフトウェア「Bin Picking Studio」
本デモンストレーションの要となっているPhotoneo社の3次元スキャナーは、これまでティーチングや設定が難しいとされてきたビンピッキングを簡単に行える画期的なパッケージ製品です。
【専用ソフトウェア「Bin Picking Studio」の特長】
■ロボットへのティーチング不要
グリッパーのCADと、ピッキング対象物のCADをあらかじめソフトウェアに登録しておくことにより、対象部品のどの部分をどういった角度でピッキングするかの把持位置設定を3Dシミュレータ上で実行できます。
■軌道演算で衝突を自動回避
ピッキングに必要なロボット軌道は専用コントローラーが自動で計算し、衝突を防いで的確なピッキングを実現することができます。部品箱のみでなく、ロボット周囲の環境も考慮して軌道演算が可能です。
■簡単キャリブレーション
一般的に、ロボットにカメラを取り付ける場合にはカメラとロボットの座標を合わせ込むためのカメラキャリブレーション作業が必要となりますが、同ソフトウェアでは細かな設定が不要。グリッパーの手先にピッキングしたい部品サンプル(ピンポン玉)を取り付けて、4回以上撮影すれば設定完了です。